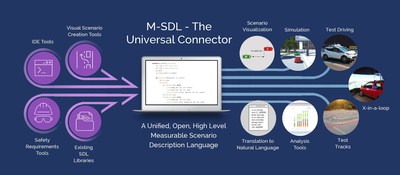
以色列特拉维夫2019年9月24日 /美通社/ -- 旨在量化自动驾驶汽车(AV)安全性的以色列初创公司Foretellix今天宣布,该公司已经向先进驾驶辅助系统(ADAS)和自动驾驶汽车产业链开放可衡量的场景描述语言(M-SDL)并向自动化及测量系统标准协会(ASAM)标准委员会贡献这种语言理念。针对当前用于核实与验证车辆安全的格式、语言、方法和指标缺点,M-SDL是首个能够解决这些问题的开放型语言。

Foretellix还公布了M-SDL合作伙伴计划,为M-SDL的业内反馈和改进提供了机制。M-SDL合作伙伴计划包括AVL List GmbH、沃尔沃集团、Unity Technologies、Horiba Mira Ltd、TÜV SÜD、Automotive Artificial Intelligence (AAI) GmbH、Metamoto Inc、Vector Zero Inc、布里斯托大学Trustworthy Systems Lab以及佛罗里达理工大学Advanced Mobility Institute等成员。
正如许多业内专业人士指出,基于模拟和道路测试的里程数、接管数量,以及/或传统测试覆盖率的安全方法和指标是不充分的、不可扩展的,并且不容易共享或再次使用。
此外,由于自动驾驶汽车和交通的不可控行为,开发人员无法确定他们的测试是否真正规划了所需的场景或按预期评估测试覆盖率。最后,这些技术都没有提供足够的机制来识别以前未知的高危场景,也没有聚合所有虚拟和物理测试平台的覆盖率指标。
通过开放和贡献M-SDL,工具厂商、供应商和开发人员将能够1)使用常见的、人类可读的高级语言来简化场景的捕获、再次使用和共享,2)轻松指定任何场景和运行条件的结合,确定以前未知的高危情况,以及3)监视和测量自主功能的覆盖率,这对于证明自动驾驶汽车无关于测试及测试平台的安全性至关重要。
Foretellix首席执行官Ziv Binyamini表示:“实现可量化的自动驾驶汽车安全性的能力仍然受限于标准、方法和指标的缺乏,导致再使用和共享困难,并且不充分,以及/或无法升级。我们相信一个开放的生态体系和开放型标准有助于ASAM创建开放式语言标准。”
可用性
M-SDL规格的0.9版本、M-SDL概述和M-SDL合作伙伴计划申请,请参见foretellix.com/open-language。Foretellix还为ASAM贡献了M-SDL理念,旨在积极帮助制定下一代OpenSCENARIO标准。