无锡2019年5月16日 /美通社/ -- 新纳传感系统有限公司(Aceinna, Inc. 下称新纳传感)将携旗下四大惯性导航产品参加5月22号在北京开幕的第十届中国卫星导航年会(CSNC),展位位于北京国测国际会议会展中心T38。新纳传感将展示其聚焦自动驾驶市场的核心惯性导航产品,包括OpenIMU300, IMU381ZA, INS1000, 以及新产品OpenRTK330。此外,新纳传感首席技术官Mike Horton作为组委会特邀嘉宾,将于5月23日上午10:50在“高精度位置导航”分会上发表“高精度、低功耗、低成本GNSS/INS器件和RTK/PPP网络架构”的主题演讲;23号下午2点,新纳传感将在会展中心B1层新技术新产品发布区召开OpenRTK330新产品发布会。

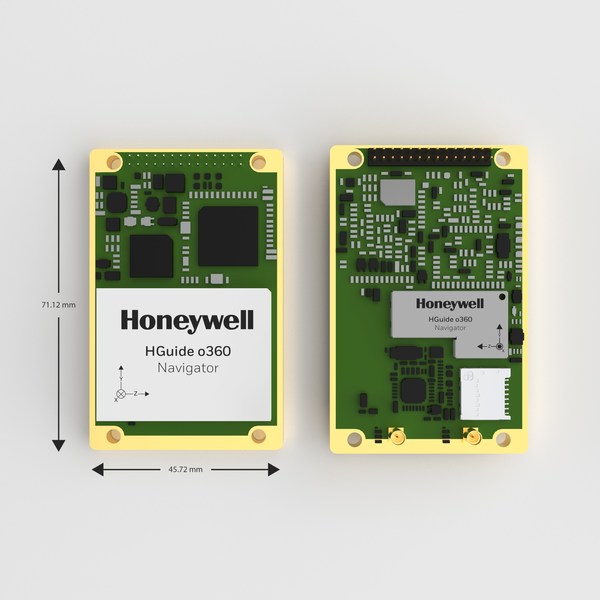
新纳传感一直聚焦自动驾驶导航定位技术,目前已经开发出完整的产品线,包括高性能代码开源惯性测量单元(IMU)和高精度GNSS实时动态(RTK)导航系统,并获得了不俗的市场反响。新纳传感IMU381ZA入选了《Electronic Products》评选出的“十大汽车传感器”;代码开源OpenIMU平台获得了《Design News》2019 GOLDEN MOUSETRAP AWARDS(金鼠夹奖)、Frost & Sullivan“全球新产品创新奖”等多个奖项。此次新纳传感将在中国卫星导航年会展示的四大惯性导航产品包括:

自动驾驶车辆需要依靠多种传感器的融合,既需要能够获取外部环境数据的感知型传感器摄像头和激光雷达,也需要能够获取位置信息的定位型传感器GNSS和IMU。由于IMU不依赖于外部环境,使其成为安全和传感器融合的核心技术之一。IMU可用于填补GNSS信号更新之间的空白,甚至可以在GNSS信号缺失或其他传感器停止工作期间利用航迹推算(Dead Reckoning)技术来确定位置。因此,高精度IMU是自动驾驶方案中的核心传感器之一。基于光纤陀螺技术的传统高精度IMU由于成本过高无法用于汽车市场,而以新纳传感为代表的新型IMU供应商推出了基于MEMS的高精度低成本IMU解决方案,有望消除高精度IMU纳入自动驾驶方案的成本障碍。
新纳传感董事长兼CEO赵阳博士表示:“自新纳成立以来,我们一直致力于开发高精度低成本惯性导航产品和方案,聚焦自动驾驶市场。我们希望在中国卫星导航年会上展示我们最新的产品和技术,并与客户及合作伙伴进一步深入沟通,通力协作,加快自动驾驶技术的整体商用化步伐。”
如需了解新纳传感惯性导航产品更多信息,下载产品数据表和用户手册,请访问www.aceinna.cn/inertial-systems